PlanaReLoc: Camera Relocalization in 3D Planar Primitives via Region-based Structure Matching
Abstract
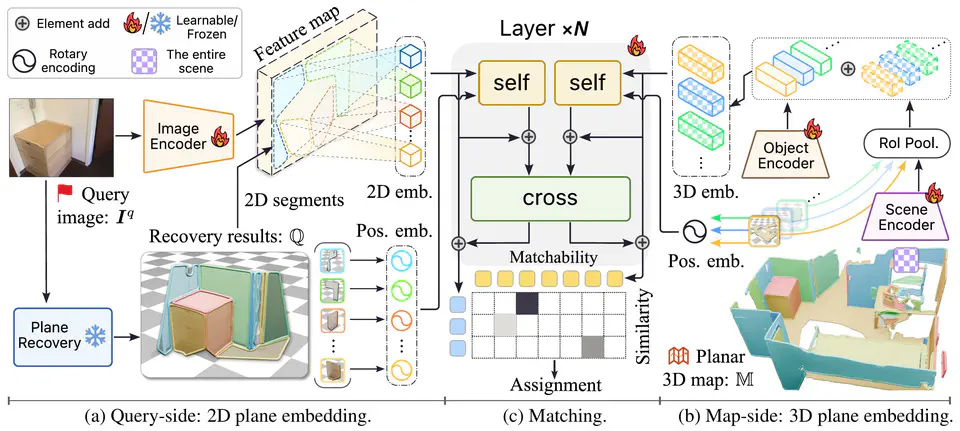
While structure-based relocalizers have long strived for point correspondences when establish or regress query-map associations, in this paper, we pioneer the use of planar primitives and planar 3D maps for lightweight 6-DoF camera relocalization in structured environments. Planar primitives, beyond being fundamental entities in projective geometry, also serve as region-based representations that encapsulate both structural and semantic richness. This motivates us to introduce PlanaReLoc, a streamlined “plane-centric” paradigm where a deep matcher associates planar primitives across the query image and the map within a learned unified embedding space, after which the 6-DoF pose is solved and refined under a robust framework. Through extensive experiments on the ScanNet and 12Scenes datasets across hundreds of scenes, our method demonstrates the superiority of planar primitives in facilitating reliable cross-modality structural correspondences and achieving effective camera relocalization without requiring realistically textured/colored maps, pose priors, or per-scene training. The code and data will be released.