Abstract
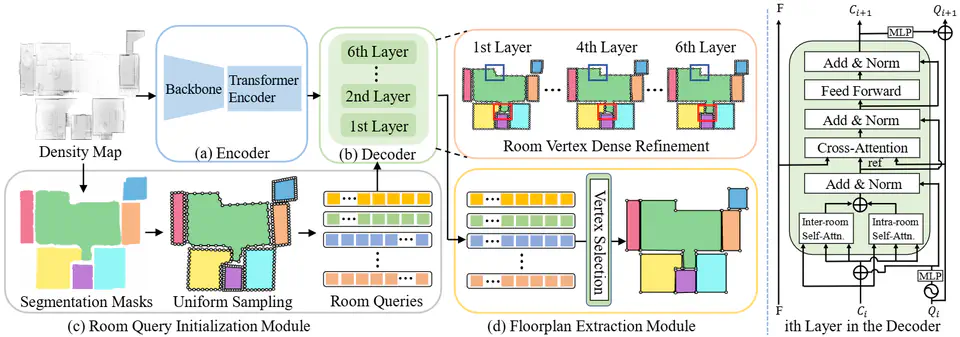
Reconstructing the geometry and topology structure from raw unstructured data has always been an important research topic in indoor mapping. In this paper, we aim to reconstruct the floorplan with a vectorized representation from point clouds. Although considerable advancements have been achieved in this field over recent years, current methods still face several challenges, including missing corners or edges, inaccurate corner positions or angles, self-intersecting or overlapping polygons and even implausible topology. To address these challenges, we present PolyRoom, a room-aware Transformer for floorplan reconstruction by introducing uniform sampling representation, room query initialization and hierarchical self-attention. Specifically, we first project the 3D point clouds as a 2D density map and initialize room queries through instance segmentation and uniform sampling. Then, in the Transformer, room queries first interact with each other with hierarchical self-attention. After that, with deformable cross-attention, vertex coordinates are refined layer by layer under dense supervision. Finally, the compact and structured floorplan is extracted through simple corner vertex selection operations. Experimental results on two widely used datasets demonstrate that PolyRoom outperforms current state-of-the-art methods both quantitatively and qualitatively. We will publicly share all our code.