摘要
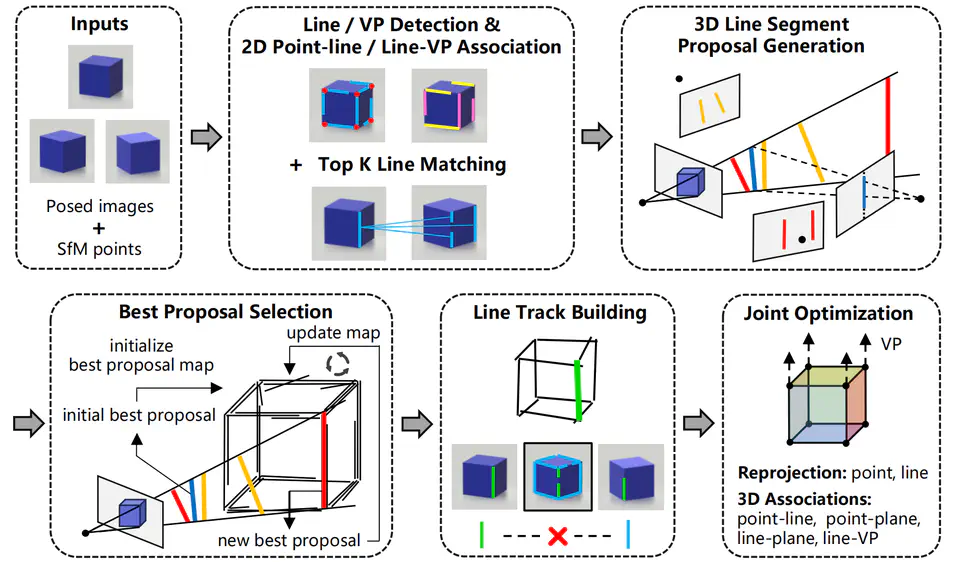
We address the problem of reconstructing 3D line segments along with line tracks from multiple views with known camera poses. The basic pipeline is first generating 3D line segment proposals for each 2D line segment, then selecting the best proposals, merging them to produce 3D line segments and line tracks, and finally performing non-linear optimization. Our key contributions are focused on exploring and alleviating the inconsistency problems in classical approaches. In the best proposal selection, we analyze the inherent inconsistency problem of support relationships from 2D to 3D determined during proposal evaluation using multiple views and propose an iterative algorithm to handle it. In line track building, we impose 2D collinearity constraints to enhance the consistency of the elements in each line track. In optimization, we introduce coplanarity constraints and jointly optimize points, lines, planes, and vanishing points, enhancing the consistency of the structure of the line map. Experimental results demonstrate that our emphasis on consistency enables our line maps to achieve state-of-the-art completeness and accuracy, while also generating longer and more robust line tracks. The full implementation of our work will be released.